 2022/07/08
2022/07/08近年来,在碳排放压力的影响下,各国新能源汽车政策支持力度持续加强。新能源汽车在整体汽车市场中的份额逐年提升。新能源汽车最重要的组成部件,即动力电池,因此锂电池的市场竞争愈发激烈。
电池模组生产有高速在线高精度检测的特点,需要相机能够满足每秒10K 帧点云轮廓以上的高速点云数据采集和处理。翌视科技推出的LVM-2600系列具有高达每秒56K点云轮廓的高速采集性能,特别是其在业界创新实现了万兆以太网数据传输和处理,能够高速传输原始点云数据。
今天为大家介绍的是翌视科技LVM-2600系列相机在锂电池行业的应用案例!
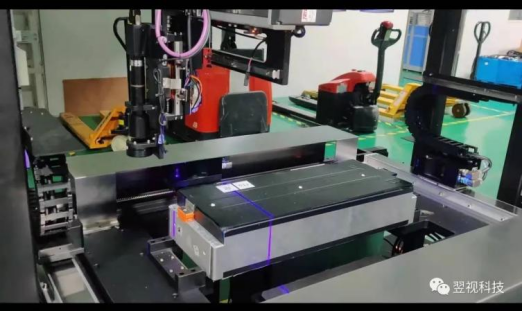
(环境搭建实物图)
原理
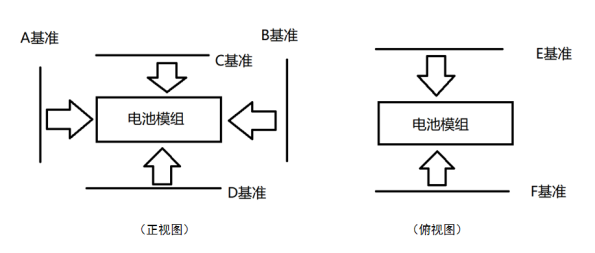
基准A到基准B为标定块长度
基准C到基准D为标定块长度
基准E到基准F为标定块长度
电池模组长度=标定块长度-A基准到电池模组左侧距离-B基准到电池模组右侧距离电池模组宽度=标定块宽度-C基准到电池模组下面距离-D基准到电池模组上面距离
电池模组高度=标定块高度-E基准到电池模组下面距离-F基准到电池模组上面距离
2.1需求分析
电池模组的六面尺寸检测
2.2采用相机
LVM-2040和LVM-2645相机(借助2D相机完成端板孔/电极孔的直径、位置检测)能满足电池模组的六面尺寸检测需求,在保证图像效果和检测精度的前提下,完全能满足10K以上的扫描速度。
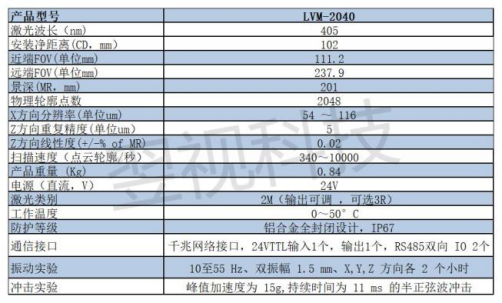
(LVM-2040相机参数)
(LVM-2645相机参数)
2.3检测方法
3D检测,模组两端及两侧通过LVM-2040相机检测电池长度、宽度及特征的尺寸, LVM-2645相机检测模组高度及端板抬脚高度方向特征,使用NVT-Proc图像算法平台,未出现缺陷判断为OK,否则判断为NG;
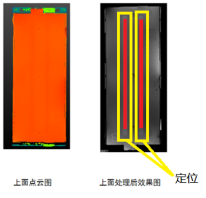
3.1模组总长测量

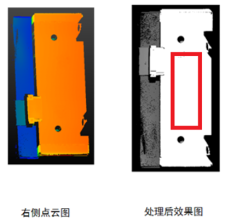
先用两个圆孔定位,保证ROI相对产品不动,取左侧图红色roi框区域,算roi框内的点到基准面的平均距离;
先用两个圆孔定位,保证ROI相对产品不动,取右侧图红色roi框区域,算roi框内的点到基准面的平均距离;
电池模组长度=标定块长度-A基准到电池模组左侧距离-B基准到电池模组右侧距离
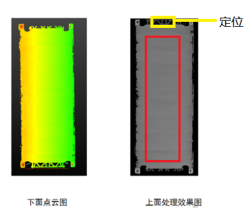
3.2模组总宽测量
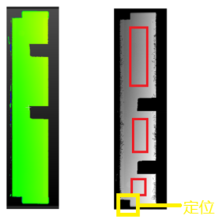
先用特征点定位,保证ROI相对产品不动,取左侧图红色roi框区域,算roi框内的点到基准面的平均距离;
先用特征点定位,保证ROI相对产品不动,取右侧图红色roi框区域,算roi框内的点到基准面的平均距离;
电池模组长度=标定块宽度-C基准到电池模组左侧距离-D基准到电池模组右侧距离
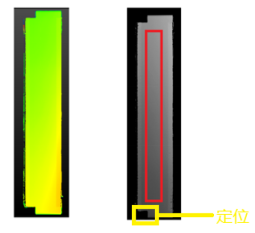
3.3模组总高测量
先用特征点定位,保证ROI相对产品不动,取左侧图红色roi框区域,算roi框内的点到基准面的平均距离;
先用特征点定位,保证ROI相对产品不动,取右侧图红色roi框区域,算roi框内的点到基准面的平均距离;
电池模组长度=标定块高度-E基准到电池模组左侧距离-F基准到电池模组右侧距离
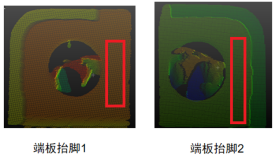
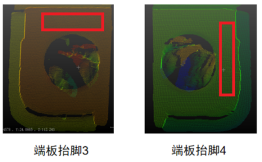
3.4端板抬脚高度测量
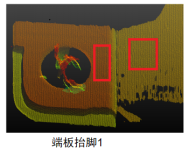
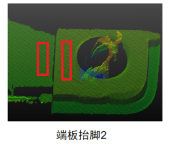

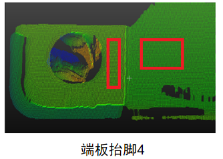
取圆孔为特征点定位,保证ROI框相对产品位置不变。取模组底面部分红色区域ROI,将ROI区域拟合成一个平面,先滤波去掉ROI框内的噪点,再求端板抬脚上ROI区域内的点到拟合平面内的平均距离。
3.5底面平面度测量
抓取特征点定位,保证ROI相对产品不动,取模组底面ROI,用最小二乘法将ROI区域拟合成一个平面,计算底面平面度。
3.6底面平面度测量
以每个圆孔区域作为特征,对每片模组进行定位,获取模组在图像中的位置(确保电池模组位置发生变化时,采点区域与模组位置相对固定);
根据模组位置信息,将4个ROI框区域拟合成一个平面,然后计算平面度。
1)具有自主知识产权的全系列产品线:高精度、高速度、高稳定性的3D相机,性能指标达国际一流水平,测量重复精度达到0.1微米内,扫描速度最高可达56000Hz;
2)具有业内领先的3D视觉解决方案能力:算法系统强大,可以用于多路点云数据拼接,帮助客户实现技术革新;
3)应用场景丰富:可提供定制化的3D相机,满足各种现场检测及测量环境,目前已广泛应用于消费电子、新能源电池、汽车制造、钣金加工等多领域。


